Роботизовані механізми оточують нас всюди. Слово “робот” походить від чеського “robota”. Ним відомий фантаст Карел Чапек назвав штучних істот, які зовні нагадували людей та працювали замість них. З фантастики поняття робот вже давно перебралося до повсякдення. Та конструкція людського тіла оптимальна для виконання далеко не кожної роботи, а тому сучасні роботи можуть бути самих різних конфігурацій та конструкцій, геть не схожих на початкову ідею Чапека.

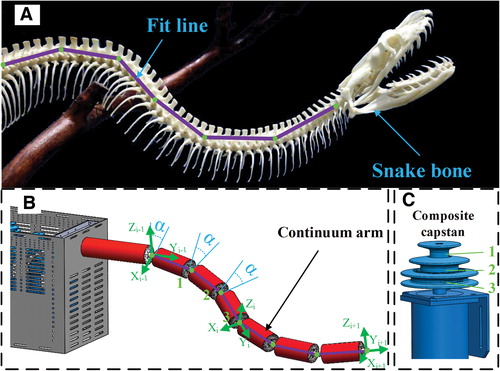
Типові людиноподібні роботи мають кінцівки, подібні до людських – із суглобоподібними з’єднаннями та жорсткими конструкціями. Такий же підхід використовується в багатьох промислових маніпуляторах. Протилежну будову мають так звані континуальні роботи – continuum robots. Їхні частини мають нескінченну кількість ступенів свободи та умовних суглобів. Іншими словами, вони здатні згинатися як завгодно та в будь-якому місці. Наприклад, як натхненний анатомією змії маніпулятор на головному зображенні. Подібні структури використовуються у самих різних сферах – від медицини до космосу.
Звісно, з практичної точки зору кількість ступенів свободи є обмеженою, але все одно більшою за наші руки. Тут зарадити ситуації можуть так звані м’які роботи – ми писали про них раніше.
Іншим питанням є керування роботами. Зазвичай в якості центру управління розглядається щось типу центрального процесора комп’ютера. Це нам близько – адже наша поведінка керується “процесором”, розташованим у черепі. Проте, така конструкція робить систему уразливою в разі виникнення позаштатних ситуацій. Для підвищення стабільності та надійності зараз розглядаються системи розподіленого керування. У такому разі є кілька відносно незалежних “центрів прийняття рішень”, які узгоджують свою роботу чи працюють автономно навіть в разі виведення з ладу кількох із них.
А що ж вийде, якщо поєднати ідеї розподіленого керування та континуального робота? Певно, щось подібне до восьминога!

Восьминоги є одними з найрозумніших безхребетних. Вони мають великий мозок, що забезпечує здатність до складного аналізу інформації. Проте, його будова сильно відмінна від нашого. Великі за розмірами восьминоги мають близько 500 млн нервових клітин, що порівнюване із головним мозком, приміром, собаки. Проте, на відміну від нас, ссавців, у восьминогів переважна частина нервових клітин у периферійній нервовій системі, і вони здатні працювати незалежно від головного мозку. Центральний мозок, звісно, виступає як місце прийняття високорівневих рішень, які “спускаються на виконання” до периферійних структур. Але, на відміну від нашого мозку, він не формує прямих керівних команд, що прямують до мотонейронів. У людей руйнування моторних ділянок кори супроводжується паралічем; у восьминогів же – ні. Кінцівки восьминогів, “руки” є автономнішими не лише стосовно контроля рухів, а й у самозабезпеченні сенсорною інформацією – вони мають хімічні, тактильні, механічні та навіть зорові рецептори.
Такі особливості роблять восьминогів справжнім прикладом системи розподіленого інтелекту. А якщо такий принцип керування поєднати із континуальними роботами, може вийти досить цікавий та корисний інструмент. Огляду наявних технічних рішень та аналізу перспектив майбутніх розробок присвячена оглядова стаття міжнародного колективу дослідників, поміж яких є і автор цього сайту.
А раніше ми розповідали, як нам вперше вдалося зареєструвати електричну активність мозку восьминогів, поки вони вільно пересуваються в акваріумі.
Джерело: O. Shamilyan; I. Kabin; Z. Dyka; O. Sudakov; A. Cherninskyi; M. Brzozowski; P. Langendoerfer “Intelligence and Motion Models of Continuum Robots: an Overview,” in IEEE Access, doi: 10.1109/ACCESS.2023.3286300.
Головне зображення: Qin G, Ji A, Cheng Y, Zhao W, Pan H, Shi S, Song Y. A Snake-Inspired Layer-Driven Continuum Robot. Soft Robot. 2022 Aug;9(4):788-797. doi: 10.1089/soro.2020.0165
Залишити відповідь